کنترل کننده ماشین اندازه گیری دید 4 محور عمومی بسته هوشمند
مقدمه
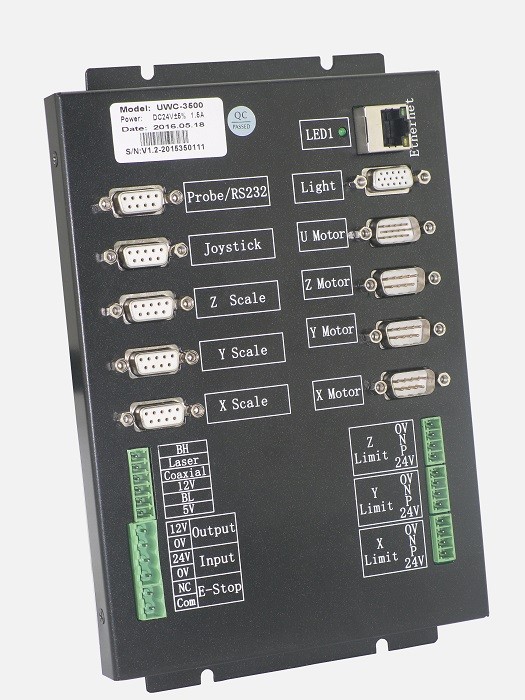
UWC 3500 یک کنترلر کلی 4 محور کامل با حلقه نزدیک است که در دستگاه اندازه گیری بینایی و دستگاه اندازه گیری بینایی ترکیبی یا سیستم های اندازه گیری اتوماسیون استفاده می شود.با مقیاس خطی یا موتور کدگر بازخورد موقعیت حلقه نزدیک، UWC3500 قادر به دستیابی به دقت بالا است.
ویژگی ها:
1ساختار ماشین بالا و پایین پیشرفته، CPU با عملکرد بالا + FPGA
2ارتباط: رابط اترنت، زمان اجرا برای یک عملکرد API واحد کمتر از 0.45ms است.
3. حالت کنترل جهت + پالس ، قادر به کنترل موتورهای مرحله ای ، سرو AC ، سرو خطی یا DDM ، و غیره
4. کنترل کامل حرکت حلقه نزدیک ، مکان گیری دقیق که سریع ، دقیق و پایدار است. الگوریتم کنترل حلقه نزدیک پیشرفته و پارامترهای PID بسیار کمی ، چرخش آسان را برای کاربران تضمین می کند.
5. S نوع منحنی سرعت، نسبت بخش S در روند کاهش سرعت می تواند تنظیم شود.
6راهکار پيدا کردن:
کنترل چرخه باز پالس + جهت
کنترل بازخورد موقعیت مقیاس خطی / رمزگذاری کننده، الگوریتم بهبود یافته PID + VFF، از بین بردن مشکل تغییر صفر.
7حالت حرکت:
نقطه به نقطه، حالت JOG، حالت هومینگ که استفاده از آن آسان و انعطاف پذیر است، مداخله خطی دو محور یا سه محور، مداخله قوس افقی، سُند لمسی و حالت جویستیک.
8سیاست امنیتی:
عملکرد تنظیم خودکار چرخش ماشین، تنظیم خودکار منطق و جهت محدوده، پارامترهای موتورها و جهت بازخورد خطی،اطمینان از حذف خطا حرکت بازخورد.
هنگامی که محور نزدیک به حد حرکت می کند، یک کاهش سرعت پیشروی وجود دارد، و قبل از هومینگ، محدودیت اجباری سرعت حرکت وجود دارد.
محدودیت نرم افزار پشتیبانی می شود.
9. عملکرد API با استفاده از کپسولی که به سمت شی است ، برنامه نویسی آسان را ارائه می دهد. اکثر پارامترها توسط نرم افزار اشکال زدایی تنظیم می شوند.
10ادغام بالا، عملکرد بالا، تولید و نگهداری پایدار و آسان.
11UWC-3500 از تکنولوژی تولید SMT استفاده می کند، ثبات و قابلیت اطمینان را تضمین می کند.
12. با انعطاف پذیری بالا UWC3500 مناسب برای تجهیزات غیر استاندارد و همچنین سفارشی از عملکرد در دسترس است.
13. UWC3500 از عملکرد به روز رسانی نرم افزار آنلاین پشتیبانی می کند ، کاربران نیازی به برداشتن کنترل کننده از دستگاه ندارند ، به روز رسانی و گسترش عملکرد آسان است ،کوتاه کردن چرخه توسعه و چرخش تجهیزات.
14. ماژول IO خارجی UWC348، حداکثر 26 در 26
15. موقعیت مقایسه عملکرد تطبیق، که می تواند به طور دقیق تطبیق یابد، همچنین کاربران می توانند محدوده ماشه تطبیق را تنظیم کنند، خروجی ماشه می تواند به دوربین یا سنسور لیزر متصل شود.
16عملکرد کنترل منبع نور استروبوفلاش عملیاتی و CCD موقعیت تطبیق عملکرد پرتاب.
17. نرم افزار اشکال زدایی قدرتمند شامل، عملیات آسان، آسان برای کاربران به چرخاندن ماشین.
پارامترها
| ماده |
دقیقه ای
|
نمادین
|
مکس
|
واحد
|
| زمان کار API |
0.425
|
0.43
|
0.45
|
ms
|
| ولتاژ قدرت ورودی |
22.5
|
24
|
26
|
VDC
|
| ولتاژ خروجی برق کمکی 12 ولت |
11.76
|
12.05
|
12.24
|
VDC
|
| برق خروجی 12 ولت |
0
|
2.0
|
2.5
|
A
|
| ولتاژ خروجی 5 ولت |
5.1
|
5.2
|
5.25
|
VDC
|
| برق خروجی 5 ولت |
0
|
1.8
|
2.0
|
A
|
| قابلیت بارگذاری 24 ولت |
0
|
3.0
|
4.0
|
A
|
| فرکانس پالس جهت |
-
|
-
|
6.5
|
مگاهرتز
|
| رزولوشن فرکانس |
0.006
|
-
|
-
|
هرتز
|
| محدوده شمارش مقیاس خطی |
- 2147483648
|
-
|
2147483647
|
CNT ها
|
| محدوده شمارش نبض جهت |
- 2147483648
|
-
|
2147483647
|
CNT ها
|
| سطح تنظیم سرعت |
-
|
-
|
1,000,000,000
|
DDS 32 بیتی
|
| پشتیبانی از رزولوشن مقیاس خطی |
-0.01
|
-
|
10000
|
امم
|
| فرکانس خروجی سیگنال مقیاس خطی |
-
|
-
|
6.5
|
مگاهرتز
|
| ورودی/خرید کلی کنترل کننده |
-
|
-
|
-
|
ترمینال
|
| رابط ارتباطی RS232 با سرعت بالا |
-
|
2
|
-
|
ترمینال
|
| ورودی / خروجی خارجی (با استفاده از یک رابط ارتباطی RS232) |
-
|
24/24
|
-
|
ترمینال
|
| خروجی جریان راننده مرحله ای |
0.07
|
-
|
1.15
|
A ((RMS)
|
| بخش فرعی راننده گام |
16
|
16
|
16
|
|
مشخصات
| نه |
مشخصات
|
UWC3500
|
| 1 |
عرضه برق
|
ورودی DC24V@2A، خروجی DC12V@2A ((قدرت CCD را تامین کنید)
|
| 2 |
اندازه گیری سازگاری نرم افزار
|
کاملا با V1 سازگاره4
|
| 3 |
ابعاد
|
255 * 118 * 53 ((ملی متر)
|
| 4 |
ارتباطات
|
USB یا اترنت جدا شده ((اختیاری)
|
| 5 |
سیاست کنترل حلقه بسته
|
باند مرده PID+VFF+
|
| 6 |
فرکانس به روز رسانی سرو
|
2.5KHz
|
| 7 |
ضد شوک مکانیکی، سرعت بهینه
|
حالت SMART
|
|
| 8 |
محور شمارش پردازنده خطی
|
3
|
|
| 9 |
محور کنترل اساسی
|
4
|
|
| 10 |
هزینه محور
|
قادر به اضافه کردن 3 محور پالس + جهت
|
|
| 11 |
حالت کنترل محور XYZ
|
نبض + جهت RS422
|
|
| 12 |
نوع موتورهای محوری XYZ (با راننده موتور خارجی)
|
سرو مرحله ای / AC / سرو خطی / سرو DC با بازخورد کدگر
|
|
| 13 |
حالت کنترل محور U A
|
RS232 به لنز زوم اتوماتیک Pomeas متصل می شود
|
|
| 14 |
حالت کنترل محور U B
|
2 مرحله درایور قدم جاسازی شده است، که از لنز زوم اتوماتیک با موتورهای گام پشتیبانی می کند، محدودیت های تک / دو طرفه پشتیبانی می شود.
|
|
| 15 |
برنامه ریزی منحنی سرعت
|
نوع نردبان/S
|
|
| 16 |
مداخله
|
تعویض خطی چند محور، تعویض قوس دو محور، تعویض سه محور
|
| 17 |
حداکثر، فرکانس نبض
|
5MHz
|
|
| 18 |
رزولوشن فرکانس پالس
|
0.001 هرتز
|
|
| 19 |
سطح تنظیم سرعت
|
1,000,000,000
|
|
| 20 |
کنترل ولتاژ آنالوگ
|
-
|
|
| 21 |
فرکانس شمارش ترانسدوسر خطی
|
6MHz/ ((فاز A یا B)
|
|
| 22 |
تعریف سیگنال ترانسدوسر خطی
|
R یا S برای اختیاری (R:12345، S:26789)
|
|
| 23 |
تجهیزات اندازه گیری سُند
|
مدار رابط سُند لمسی
|
|
| 24 |
مدار پردازش خطای سنج
|
در دسترس است، تعمیر اتوماتیک از کاوشگر nonhoming
|
|
| 25 |
سُند سازگار
|
رنیشاو/تسا تمام سری های کاوشگر تماس
|
|
| 26 |
ماژول پردازش سنج
|
محور سرعت بالا قفل، کنترل جویستیک نقطه لمس توقف خودکار و عقب نشینی خودکار، حالت نقطه تشخیص خودکار
|
|
| 27 |
کارت جمع آوری سیگنال های جویستیک
|
رزولوشن 12 بیتی، ورودی ولتاژ آنالوگ 0-5V، 3 دکمه فشار و 3 LED، کلید توقف اضطراری شامل، دکمه تنظیم سرعت شامل (به طور متقابل با دکمه 3 # استفاده می شود)
|
|
| 28 |
کارت کنترل روشنایی جاسازی شده
|
نور سطح 8 بخش + نور پایین + نور هم محوری، تنظیم نرم افزار سطح 0-200
|
|
| 29 |
عملکرد تنظیم درجه نور
|
تنظیم سخت افزاری 16 سطح در پایه تنظیم پارامتر بر اساس نیاز روشنایی
|
|
| 30 |
قابلیت کنترل نور کنتور / کنترل بانک LED
|
حداکثر. 420mA، مناسب برای اکثر ماشین های بزرگ سفر
|
|
| 31 |
رابط روشنایی خارجی پیچیده
|
قادر به اتصال به 5 حلقه 8 بخش یک رنگ قابل برنامه ریزی نور، یا 5 حلقه 8 بخش 4 رنگ قابل برنامه ریزی نور، بالا / چرخش نور
|
|
| 32 |
رابط I/O عمومی
|
ورودی جدا شده 8 بخش، خروجی 5 (متوافق ULN2803)
|
|
| 33 |
ساعت سیستم
|
سال-ماه-روز-ساعت-دقیقه- ثانیه، نمی تواند اصلاح شود
|
|
| 34 |
ارتقاء نرم افزار
|
ارتقاء مشتری در محل، ارائه راه حل سریع و به روز رسانی فنی.
|
|
| 35 |
کانکتور سنجه
|
اتصال 9 پین D-DUB، برای سیم کشی آسان تر و پایدارتر
|
|
| 36 |
کانکتور جویستیک
|
OTP6، OTP7، HC3 ((Joystick چند کلید)
|
|
| 37 |
پردازش داده های جویستیک
|
کنترل کننده به طور داخلی پردازش داده های جویستیک و کنترل حرکت، متقابل با دیگر حالت کنترل حرکت، جویستیک بررسی لمس با توقف خودکار و عقب نشینی خودکار
|
|
| 38 |
توقف اضطراری خارجی
|
دکمه توقف اضطراری منبع برق موتور را کنترل می کند
|
|
| 39 |
برنامه ریزی منحنی سرعت
|
نوع نردبان / S
|
|
| 40 |
سوئیچ محدودیت نرم افزار
|
در دسترس
|
|
| 41 |
نقطه کاهش سرعت نرم افزار
|
در دسترس
|
|
| 42 |
فاصله تعین شده برای ترمز
|
در دسترس
|
|
| 43 |
نرم افزار عیب یابی پشتیبانی شده
|
نسخه V4.0 یا بالاتر (تشخیص خودکار و تنظیم پارامتر)
|
|

 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!